
|
|
|
|
|
|
 |
| [GitHub] |
|
|
|
Citation |
|
@inproceedings{du2021curious,
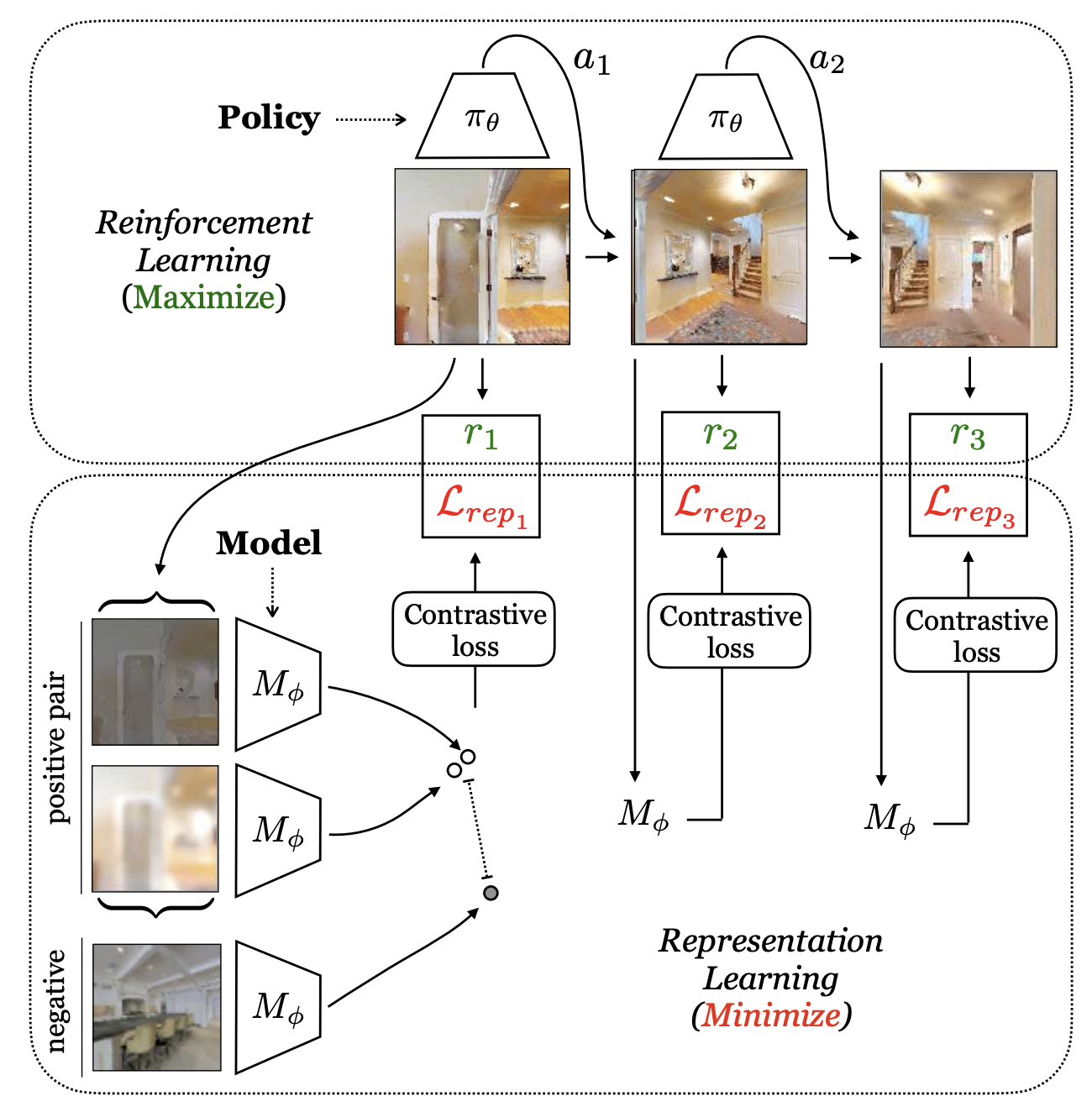
title={Curious representation learning for embodied intelligence},
author={Du, Yilun and Gan, Chuang and Isola, Phillip},
booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision},
pages={10408--10417},
year={2021}
}
|
Acknowledgements |