Abstract
The ability to reason about changes in the environment is crucial for robots operating over extended periods of time. Agents are expected to capture changes during operation so that actions can be followed to ensure a smooth progression of the working session. However, varying viewing angles and accumulated localization errors make it easy for robots to falsely detect changes in the surrounding world due to low observation overlap and drifted object associations. In this paper, based on the recently proposed category-level Neural Descriptor Fields (NDFs), we develop an object-level online change detection approach that is robust to partially overlapping observations and noisy localization results. Utilizing the shape completion capability and SE(3)-equivariance of NDFs, we represent objects with compact shape codes encoding full object shapes from partial observations. The objects are then organized in a spatial tree structure based on object centers recovered from NDFs for fast queries of object neighborhoods. By associating objects via shape code similarity and comparing local object-neighbor spatial layout, our proposed approach demonstrates robustness to low observation overlap and localization noises. We conduct experiments on both synthetic and real-world sequences and achieve improved change detection results compared to multiple baseline methods.
Approach Overview
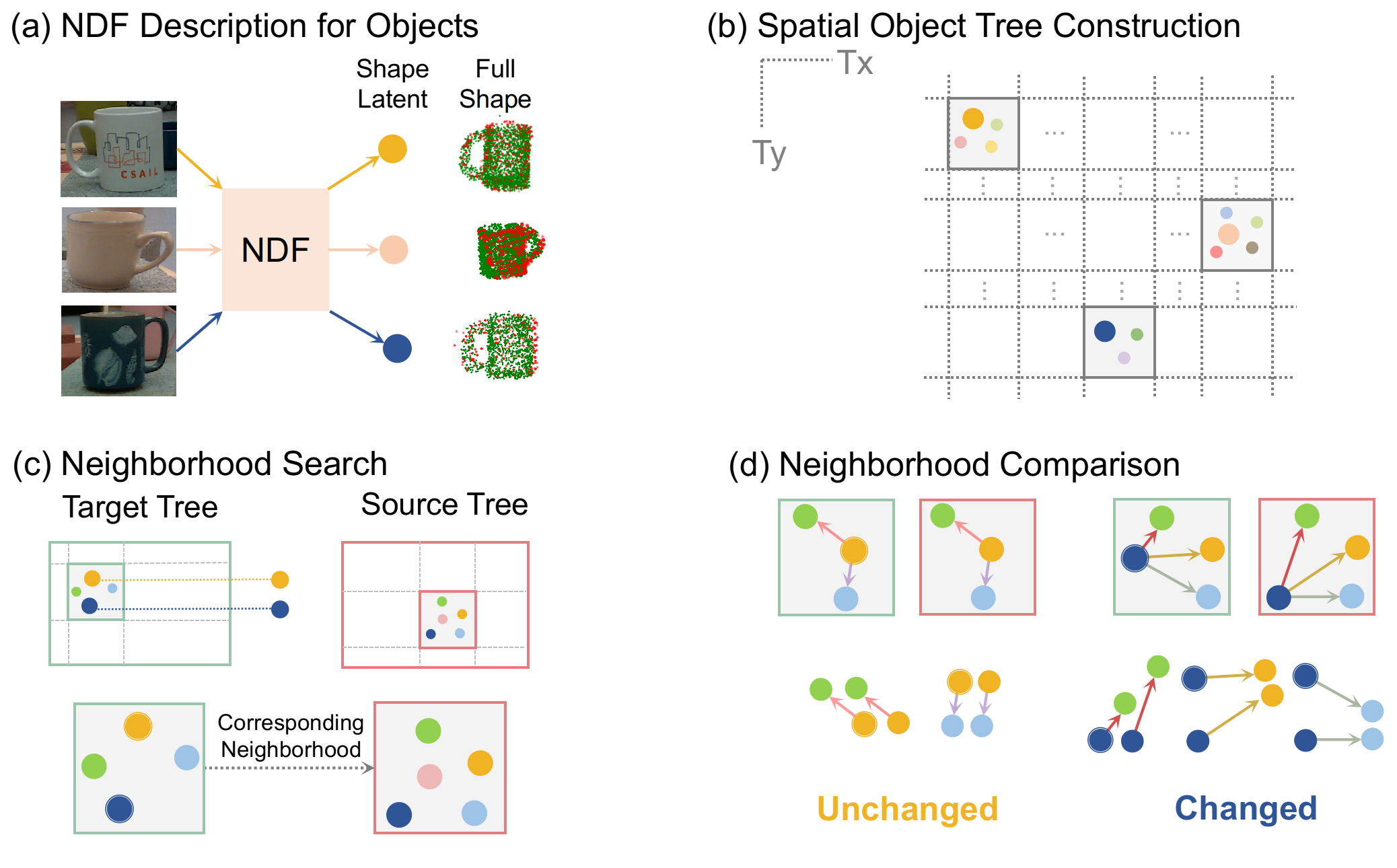
Given a sequence of observations as the source and the target, during streaming of the target sequence, the system takes in partial object point clouds from depth sensors and outputs changed objects on-the-fly in the target w.r.t the source.
(a): Given each partial object point cloud, Neural Descriptor Fields (NDFs) represent the object as a shape code encoding the full object shape and recover the object center from full shape reconstruction.
(b): Based on recovered object centers, observed objects are organized in a spatial object tree, which consists of two coordinate interval trees (Tx, Ty) and allows for fast query of neighboring objects.
(c)-(d): Corresponding neighborhoods of the current object are found from the source and the target object tree using object locations, where objects of similar shape codes are matched. For each matched object pair, object graphs of the neighborhood are constructed and compared to determine if the local object layouts are different, which implies a changed object.
Spplementary Video
Paper

Bibtex
Our Related Projects
Check out our related projects on neural fields!