I am an Assistant Professor at Harvard in the Kempner Institute and Computer Science, where I run the Embodied Minds Lab. I am also a part-time research scientist at NVIDIA Research.
I received my PhD from MIT EECS, advised by Leslie Kaelbling, Tomas Lozano-Perez, and Joshua B. Tenenbaum. Previously, I was a research fellow at OpenAI and a senior research scientist at Google DeepMind.
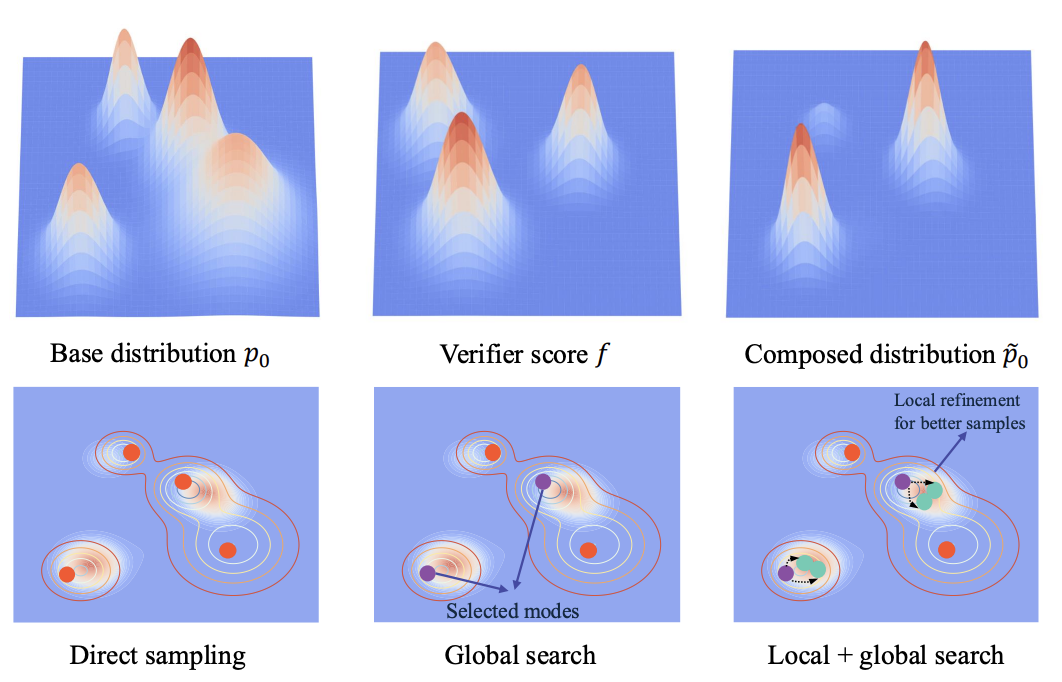
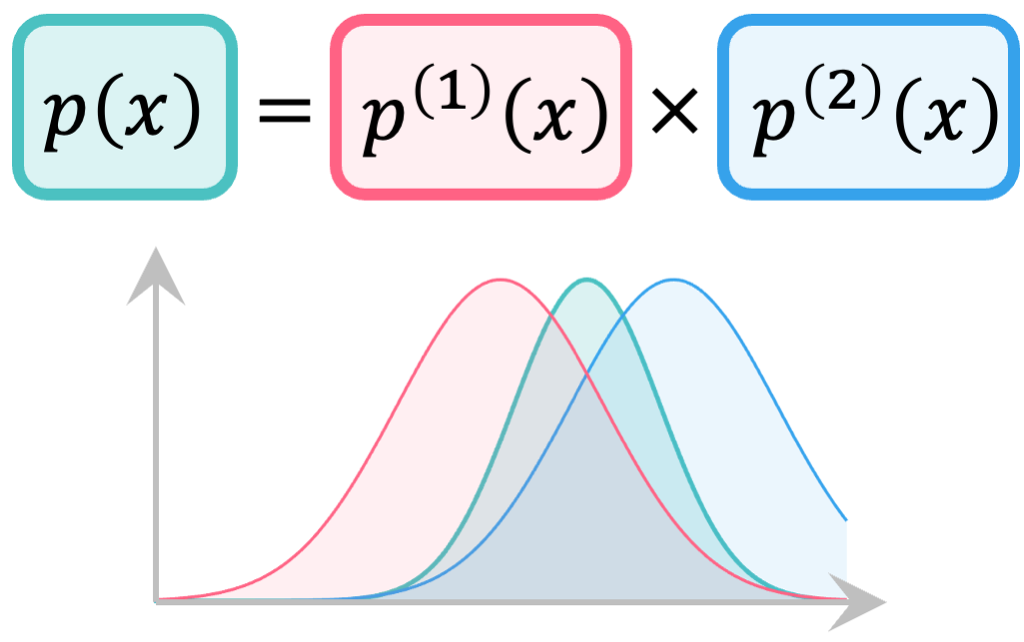
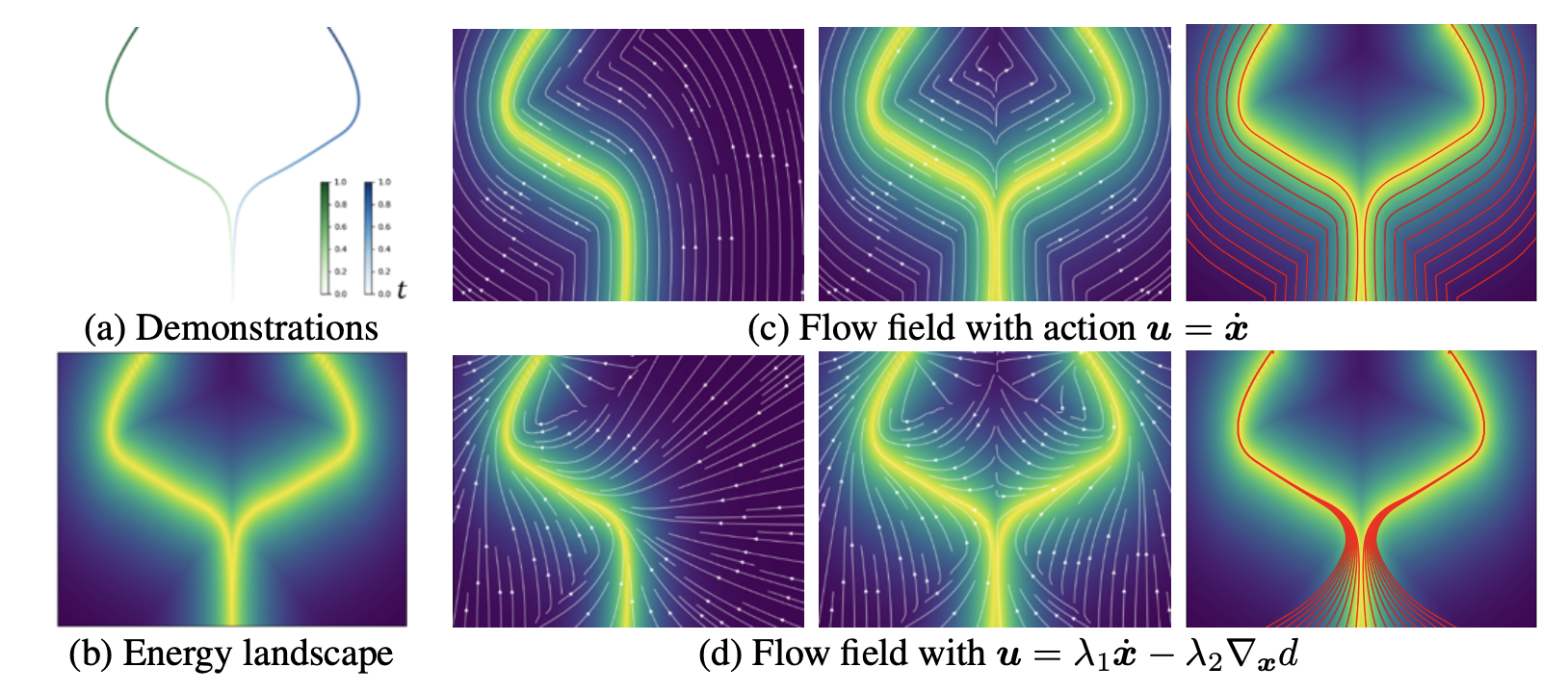
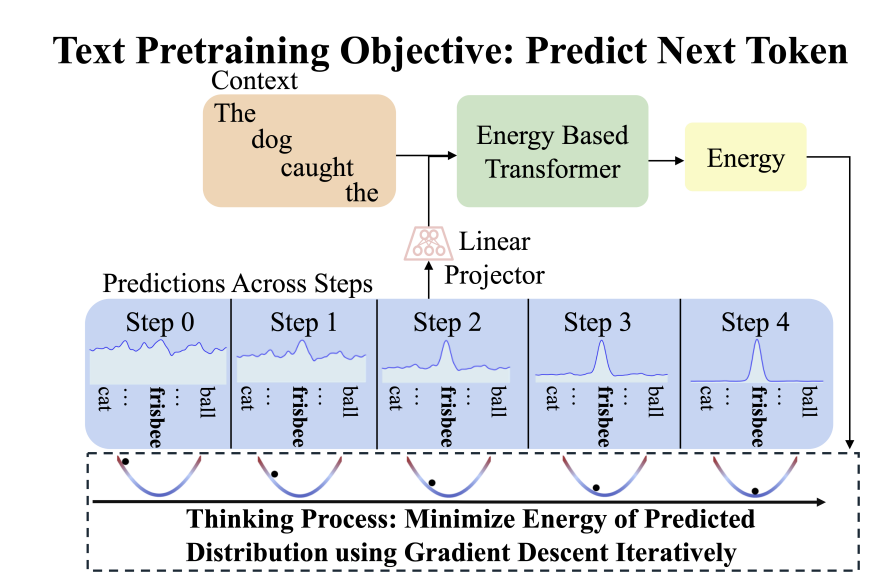
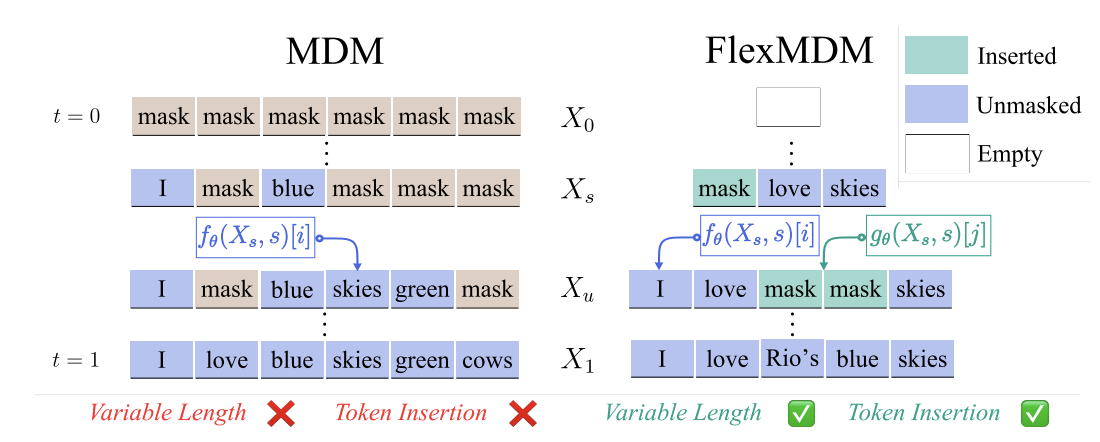
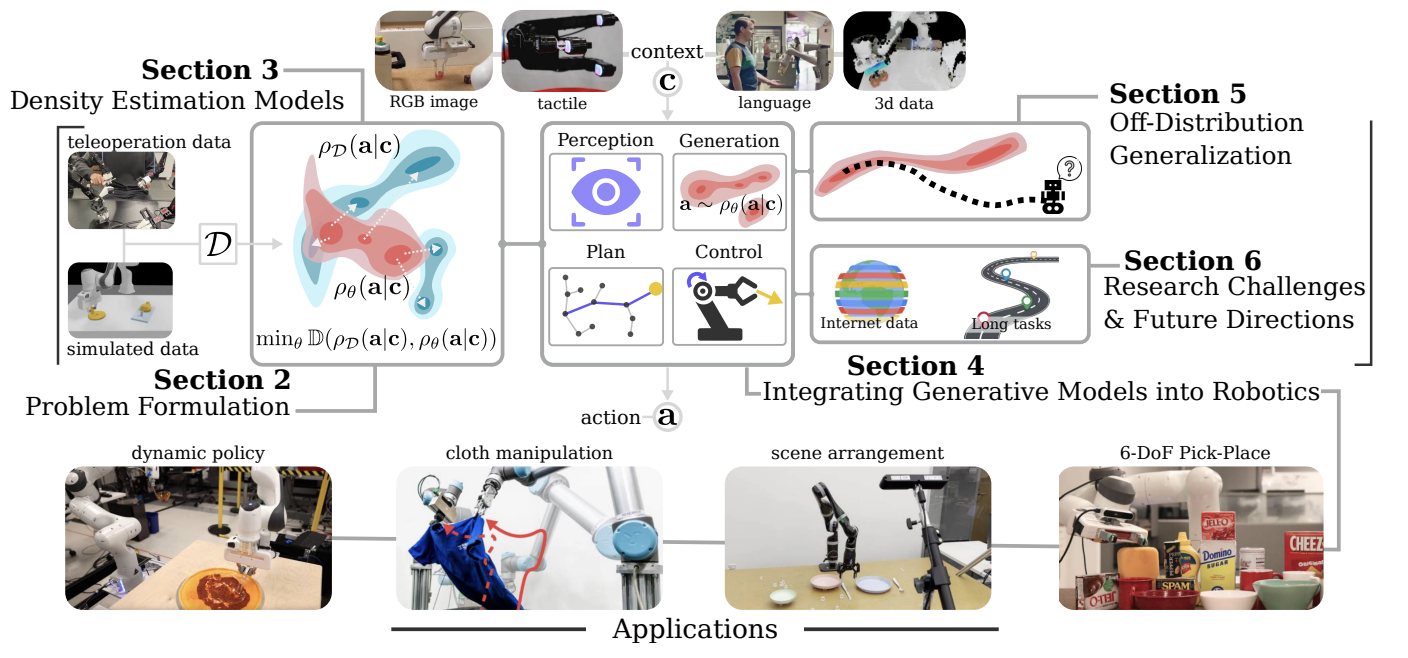
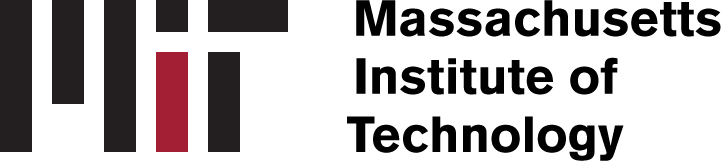
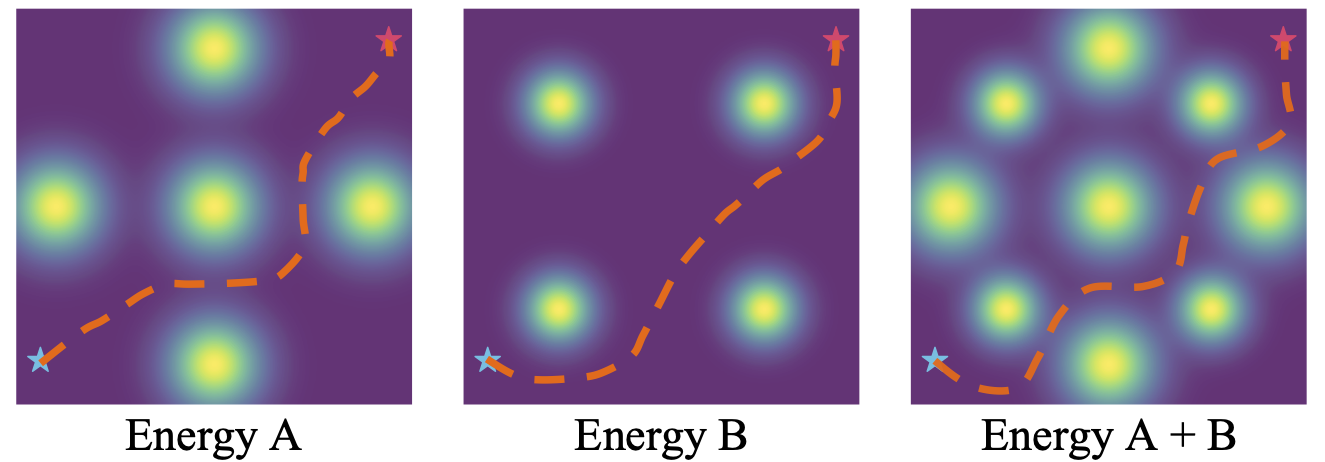
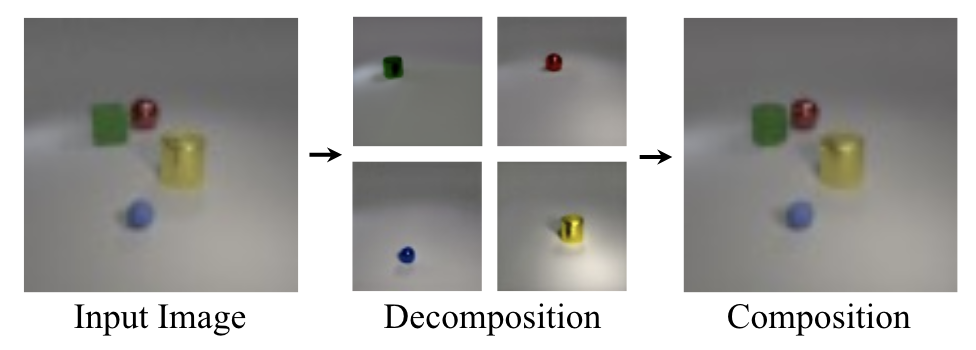
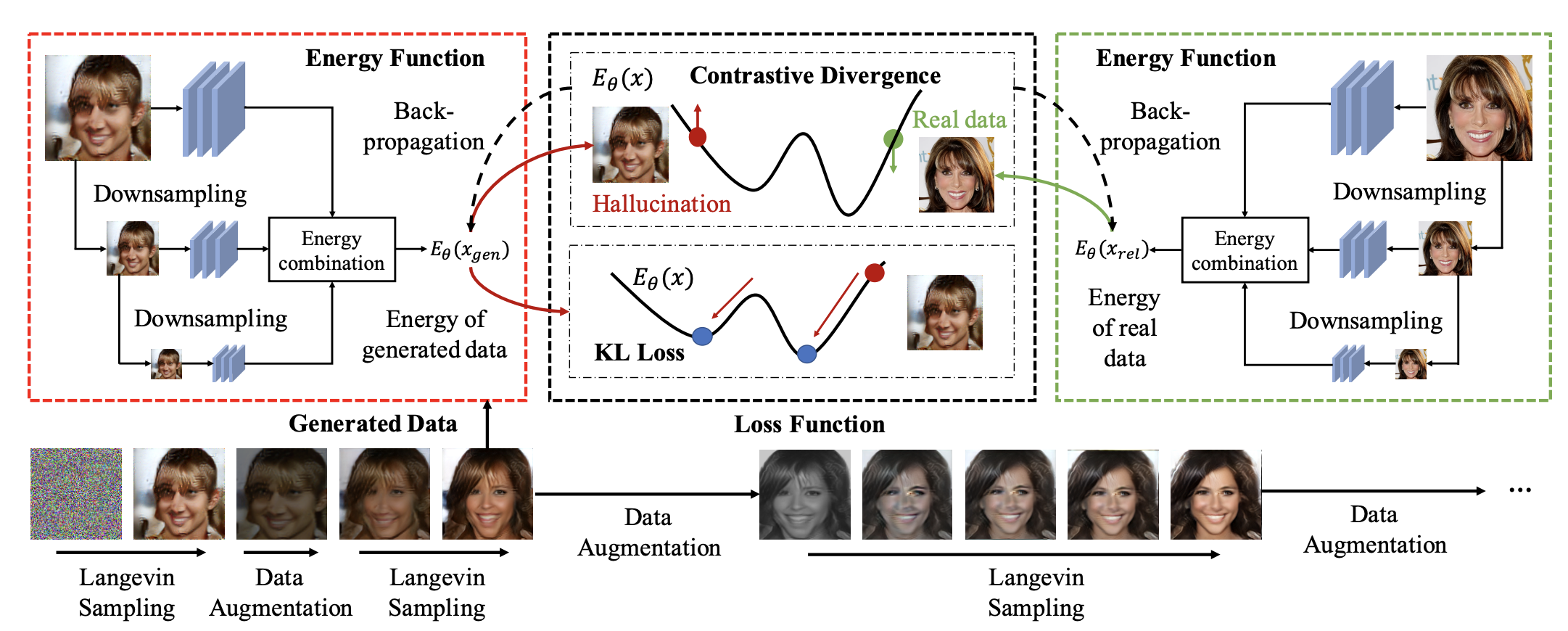
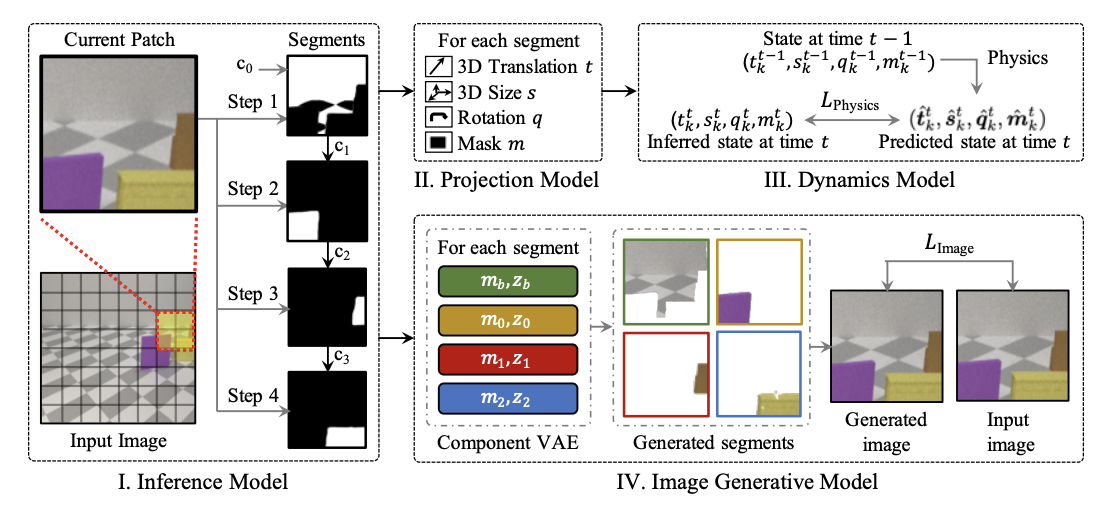
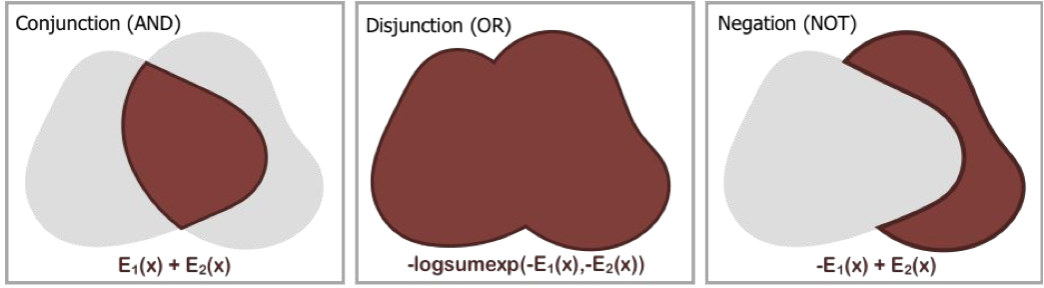
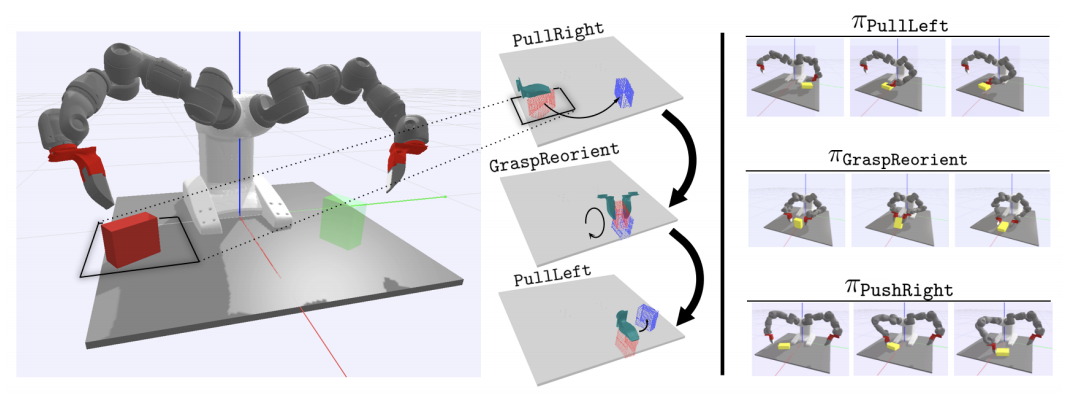
My research aims to build intelligent decision-making systems that generalize reliably beyond their training distributions. I develop compositional generative models of the world, with a particular focus on energy-based models (EBMs), which encode knowledge as learned energy landscapes and provide a natural interface for composing concepts and constraints. On top of these world models, I frame reasoning and decision making as probabilistic inference, using search and planning to combine knowledge, imagine possible futures, and adapt to new goals and situations.
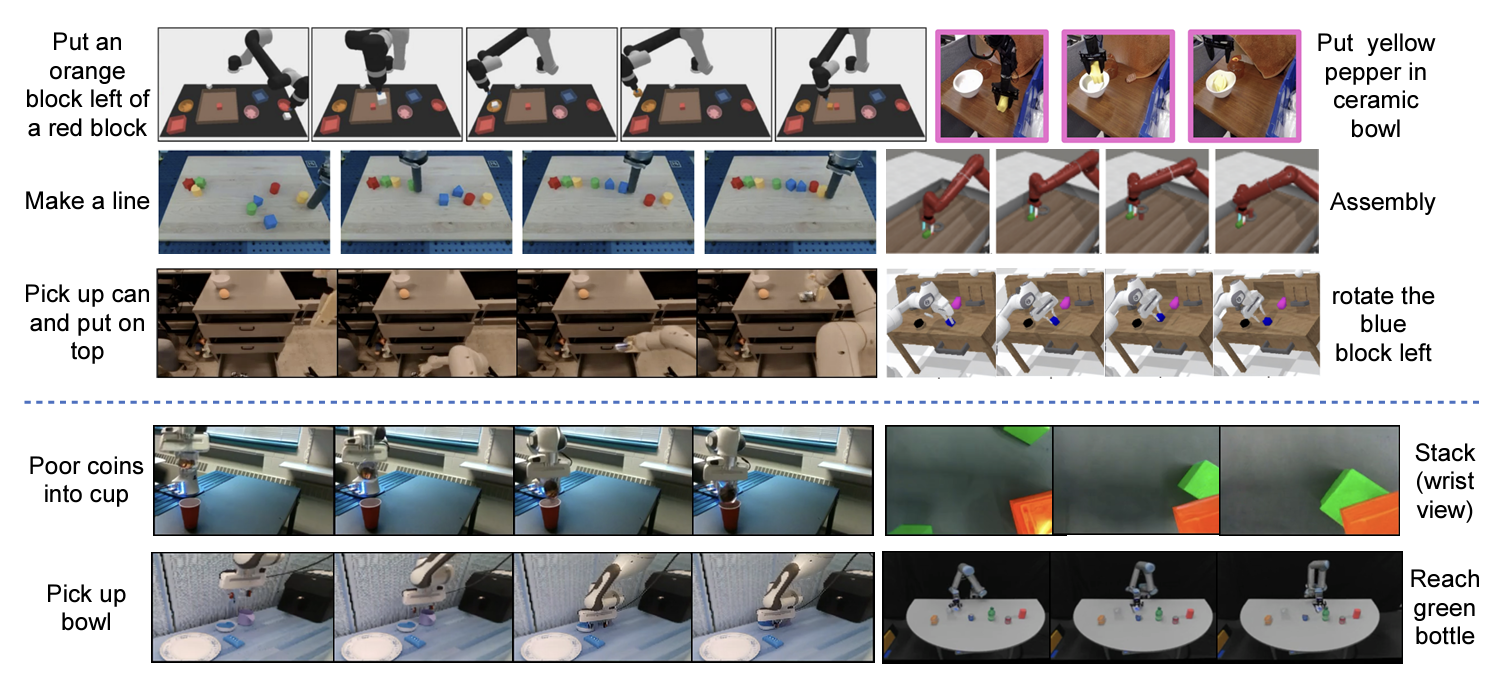
Representative work includes compositional generative modeling, video-language planning, planning with generative models, reasoning through sampling, and compositional reasoning. I am also interested in decentralized decision-making systems and multi-agent reasoning, including multi-agent debate and economies of interacting agents.
News
- [2026] I'm recruiting PhD students for the December 2026 application cycle through the Embodied Minds Lab.
- [2026] We are organizing the ICML 2026 workshop on compositional learning!
- [Talk] Presented compositional world models for embodied intelligence at the Kempner Frontiers of NeuroAI Symposium. Watch the talk.
- [PhD] Defended my PhD at MIT EECS. View the defense or read the thesis.
Research Themes
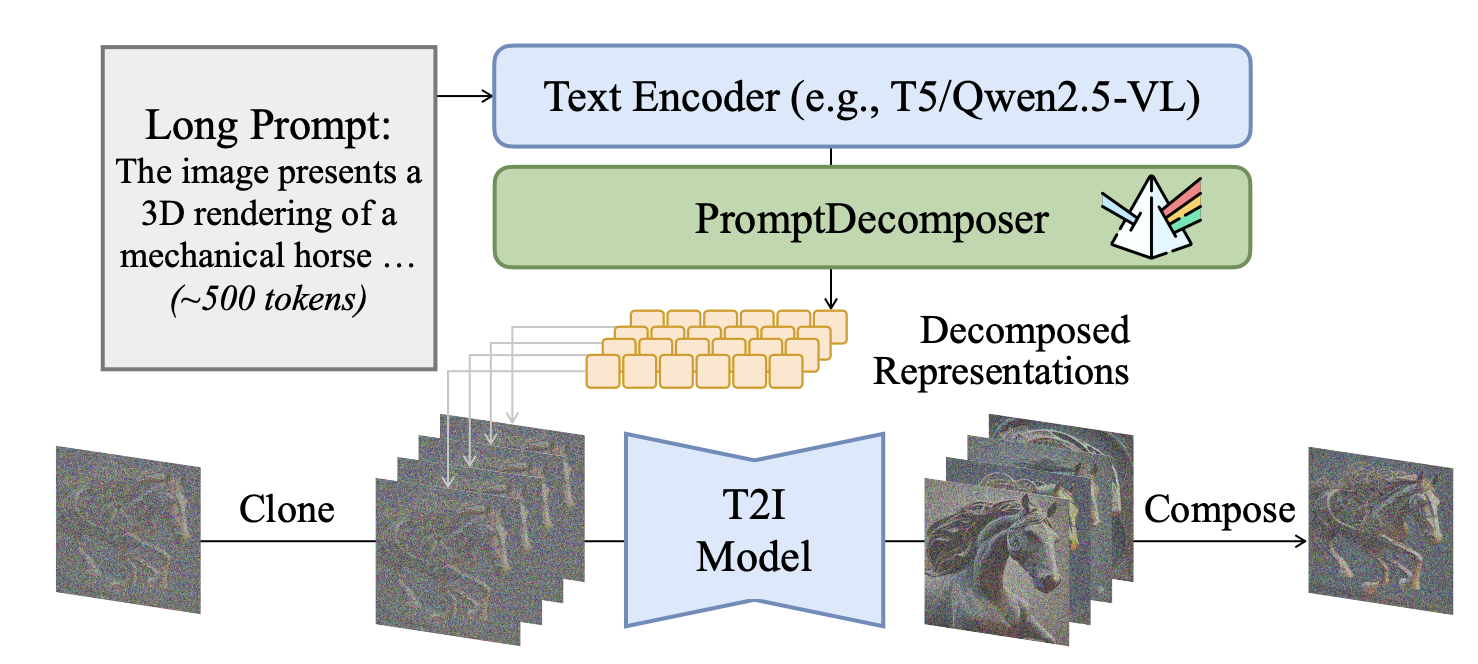
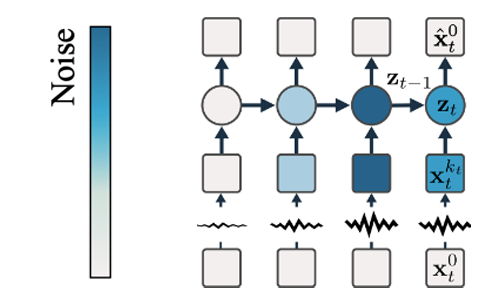
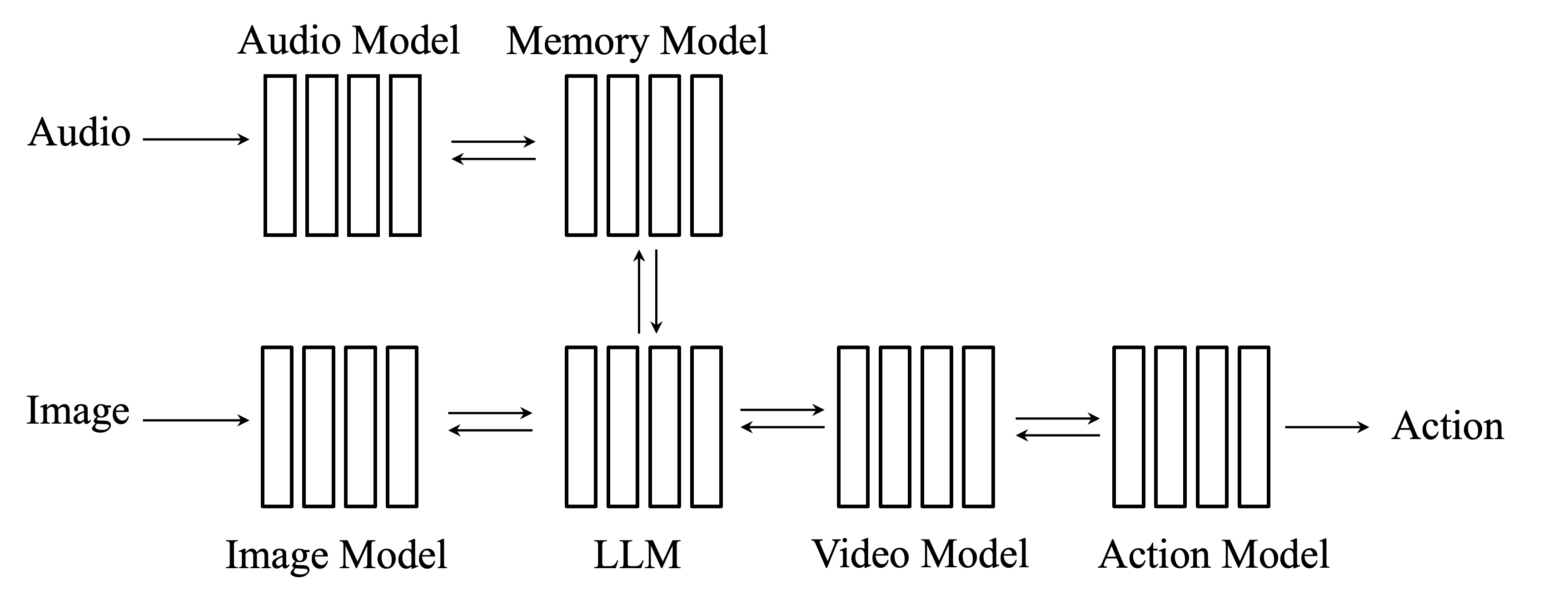
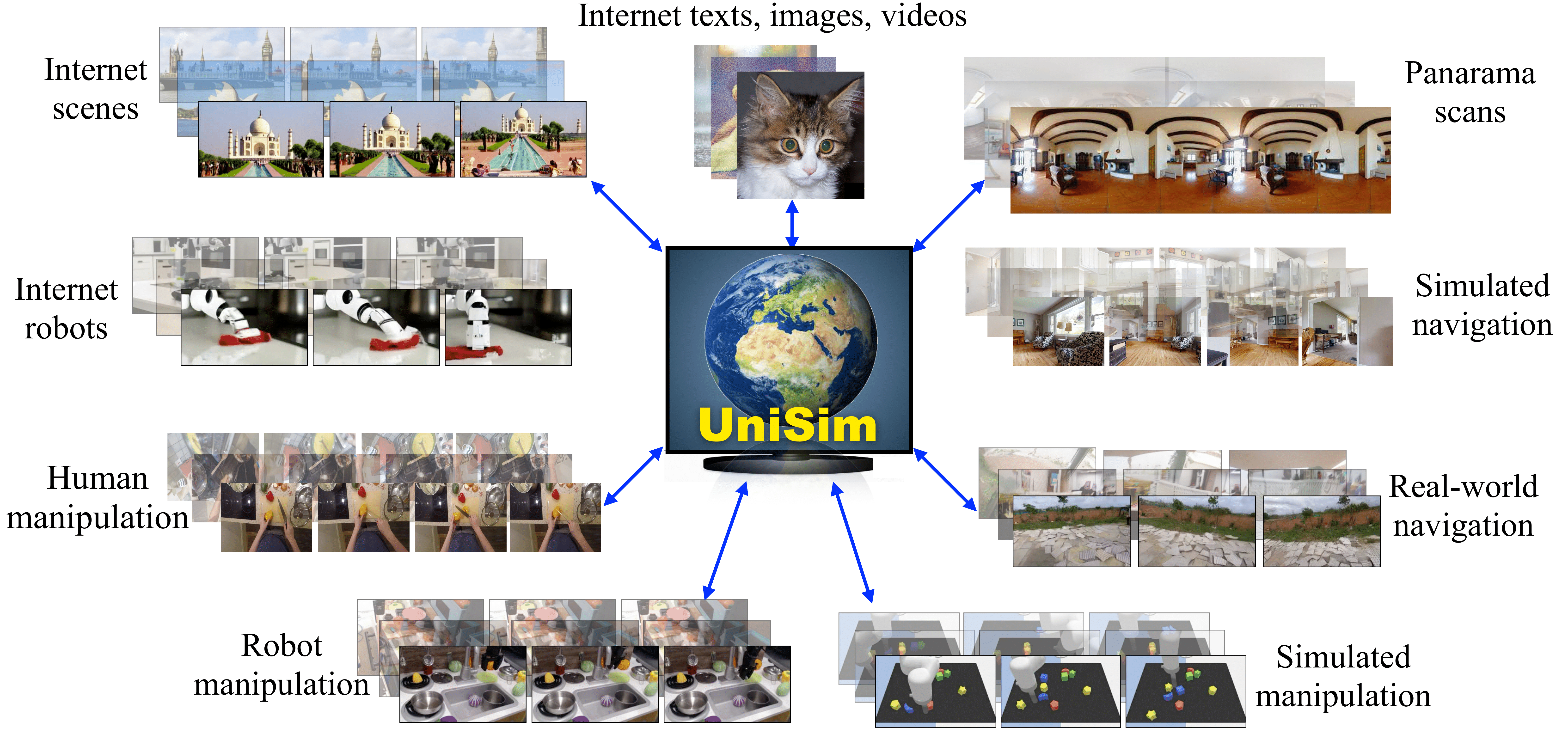
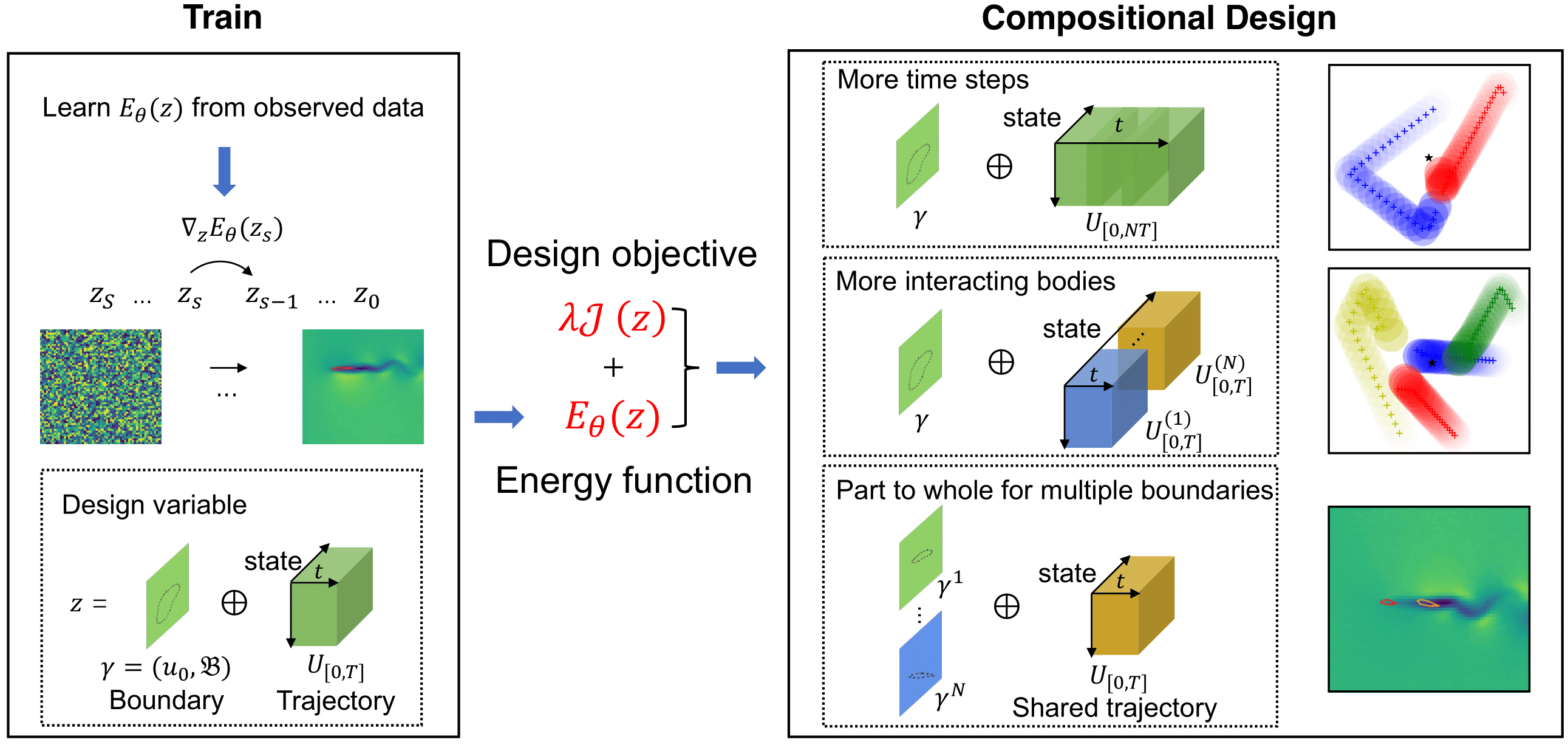
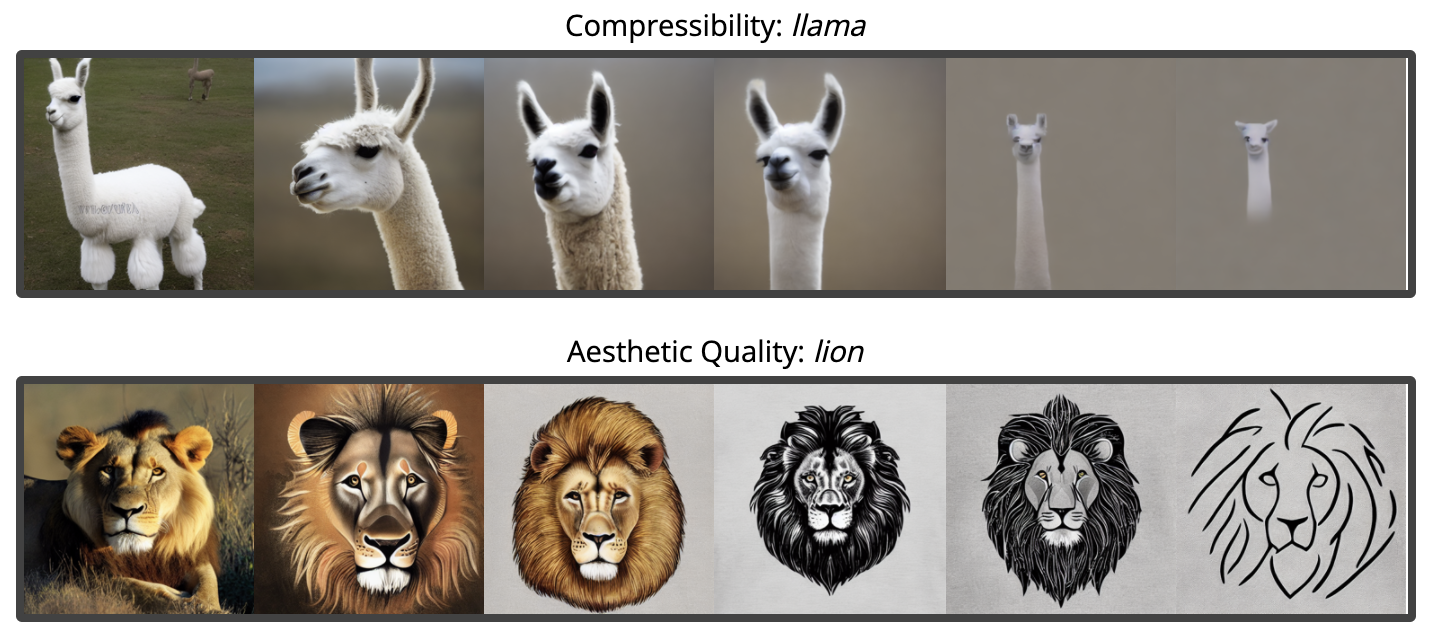
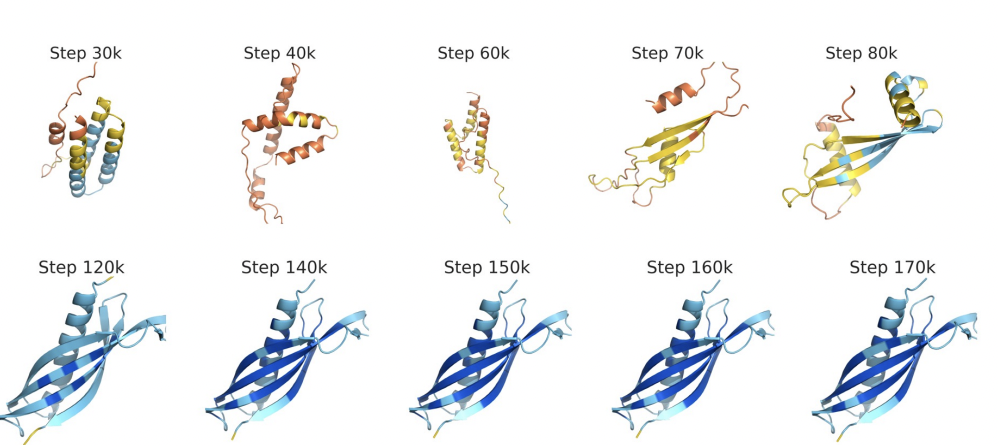
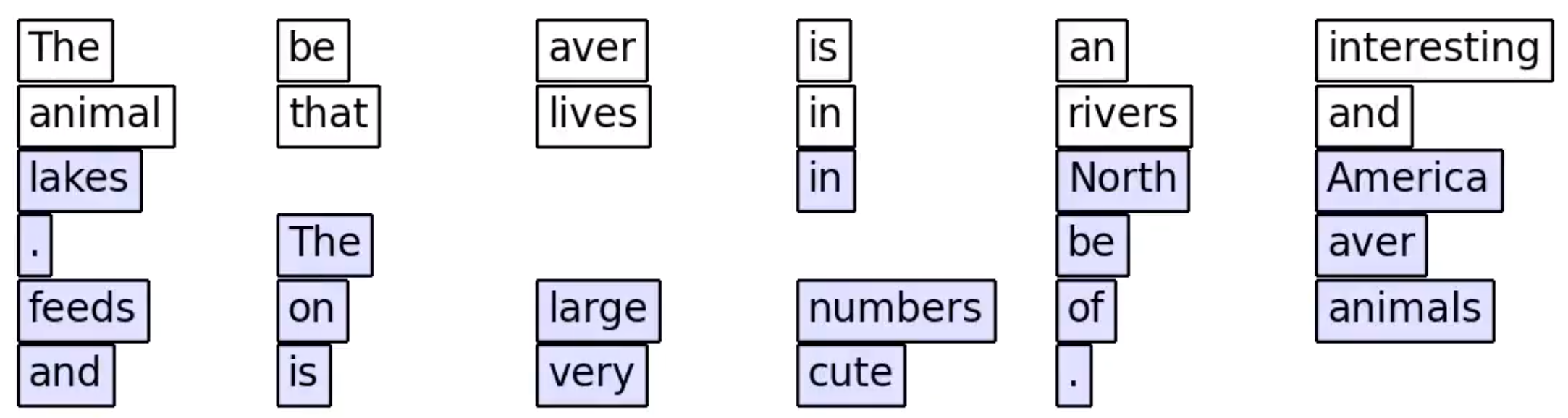
- Compositional World Models: learning generative models—especially EBMs and diffusion models—that represent worlds, concepts, and constraints compositionally.
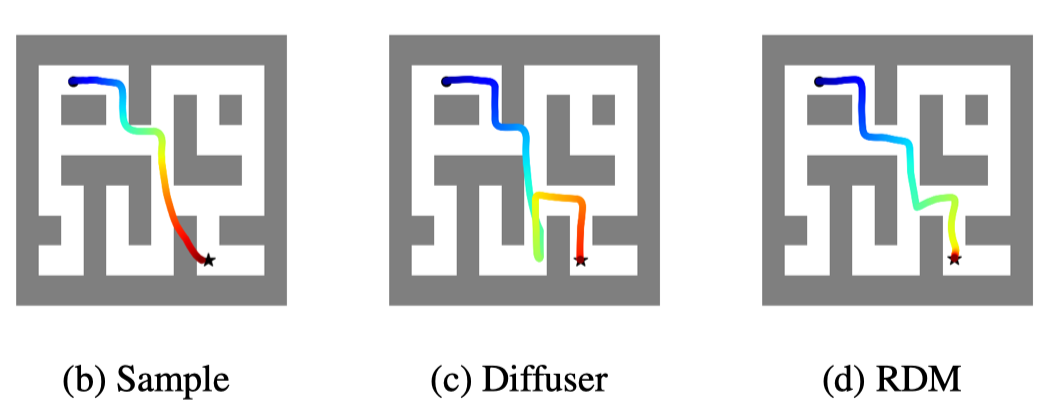
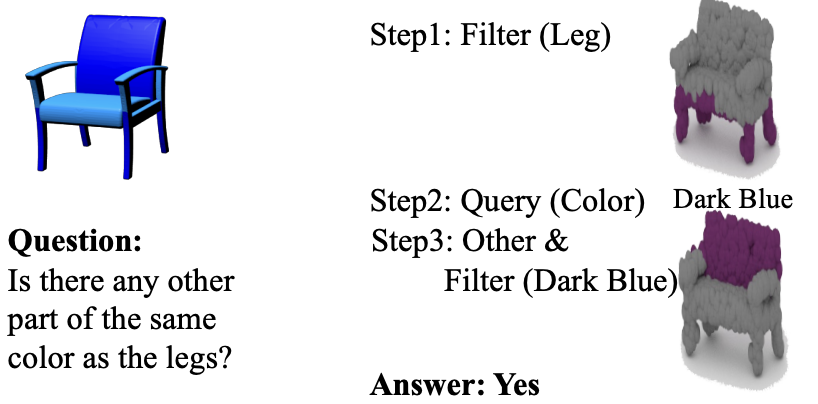
- Reasoning & Planning: using inference, sampling, search, and planning to combine knowledge and adapt to new tasks.
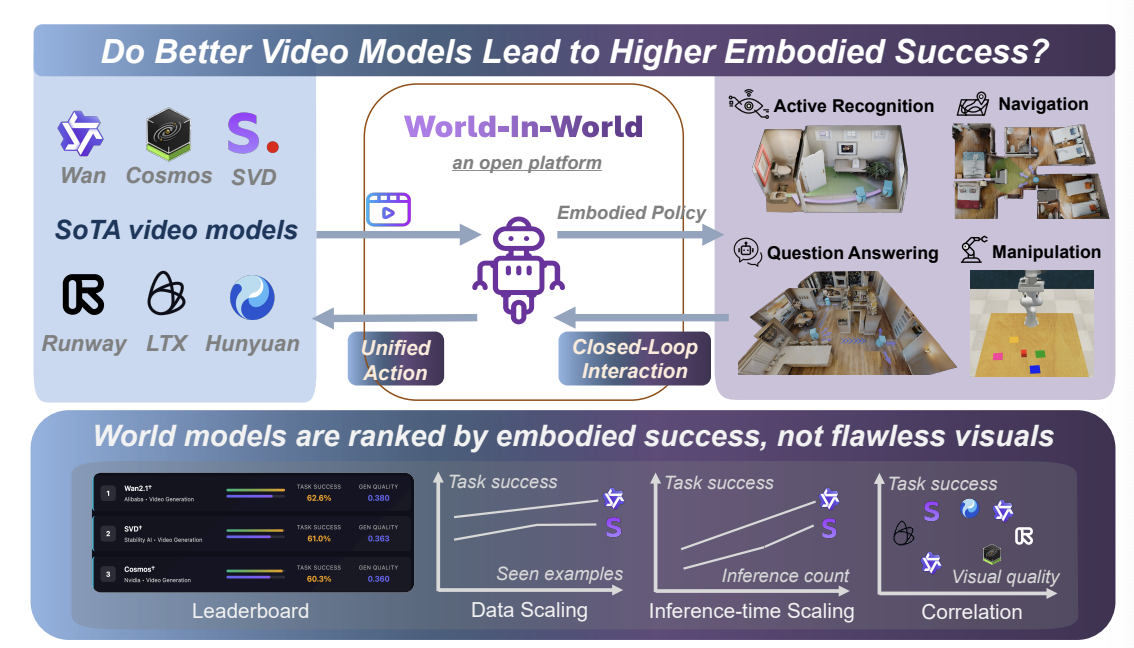
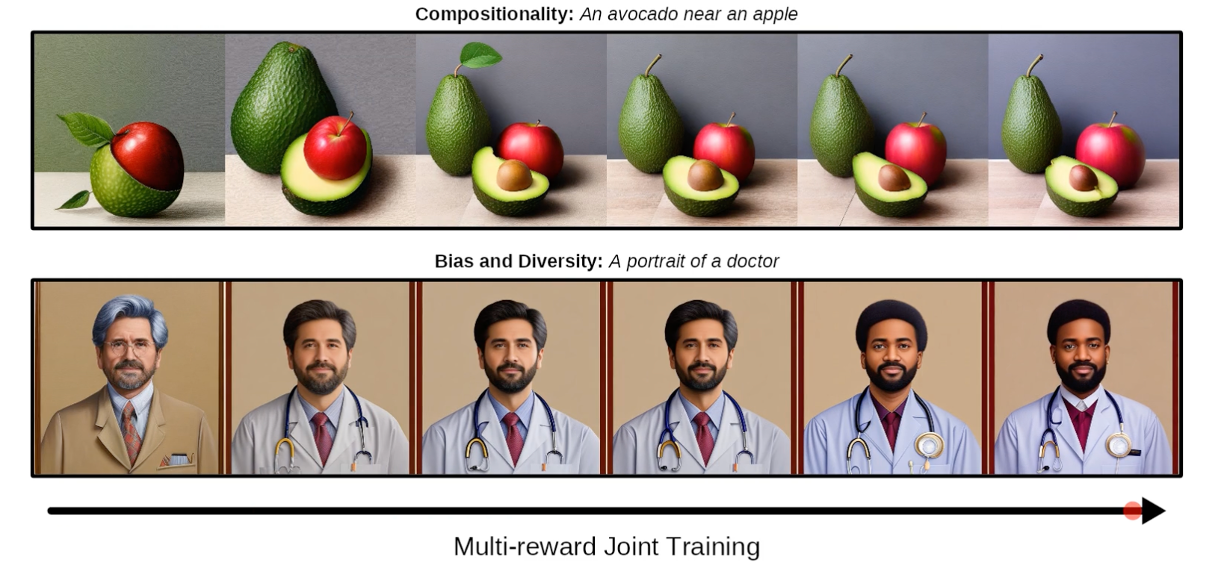
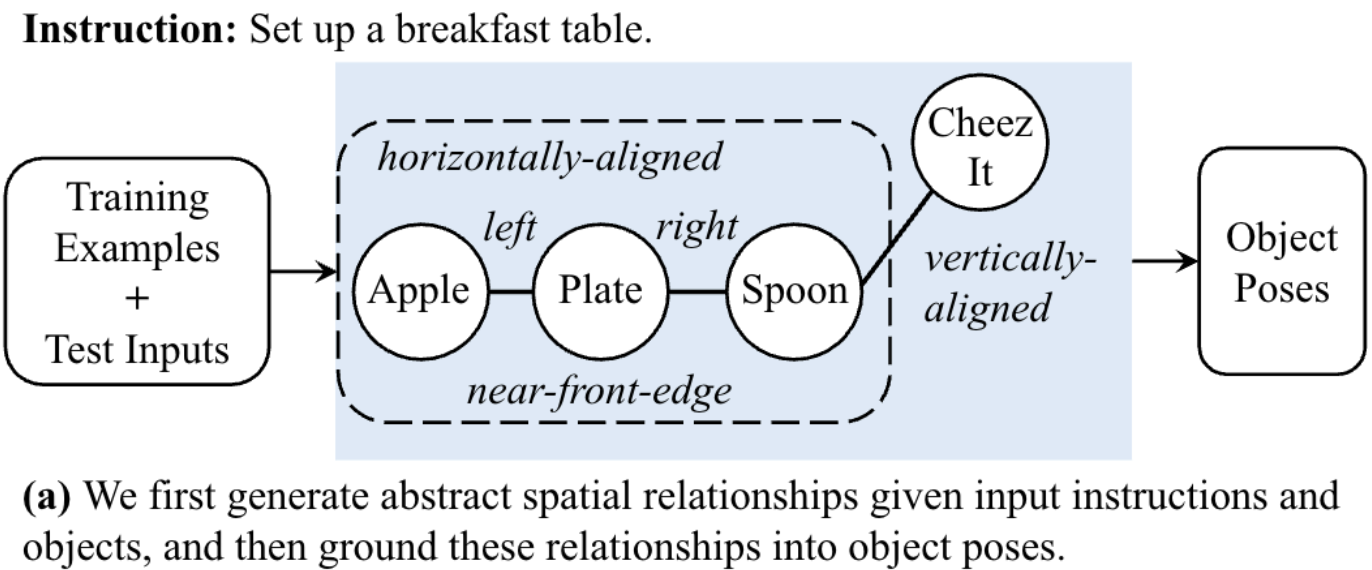
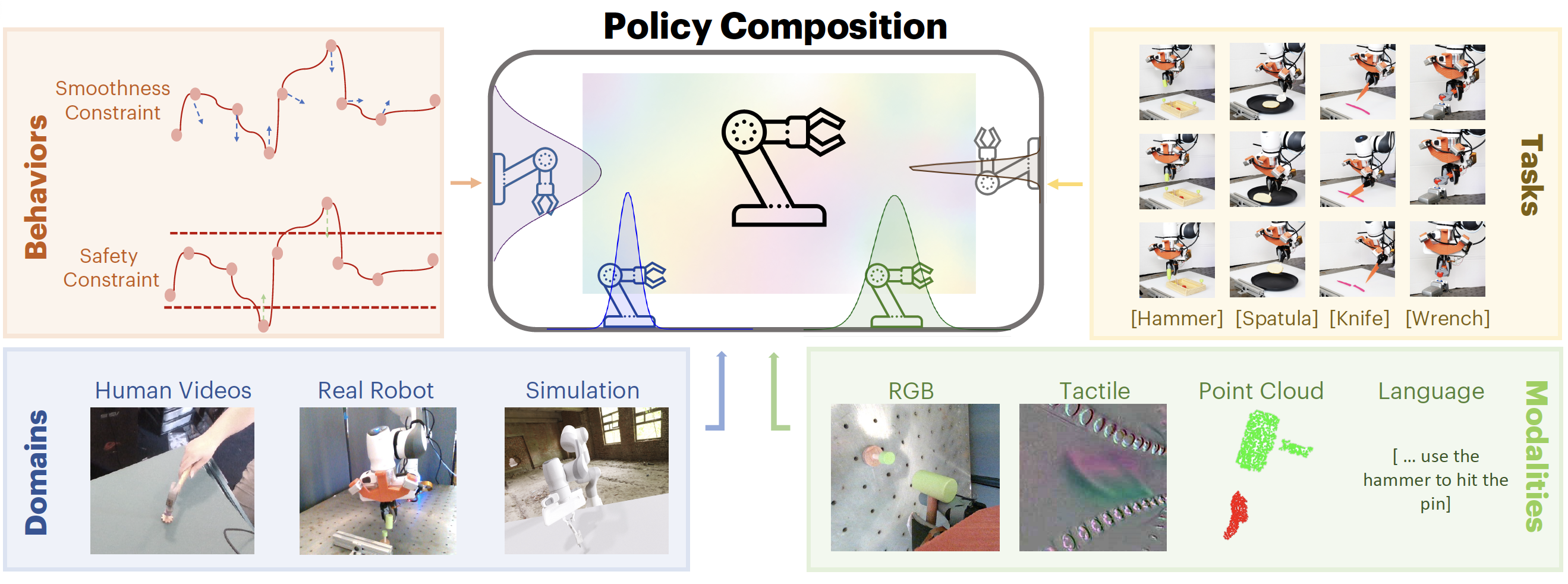
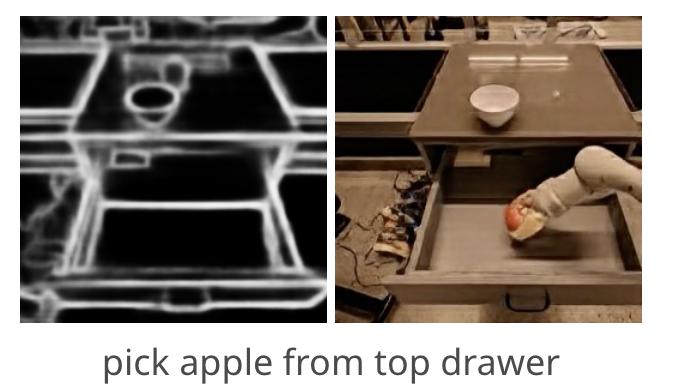
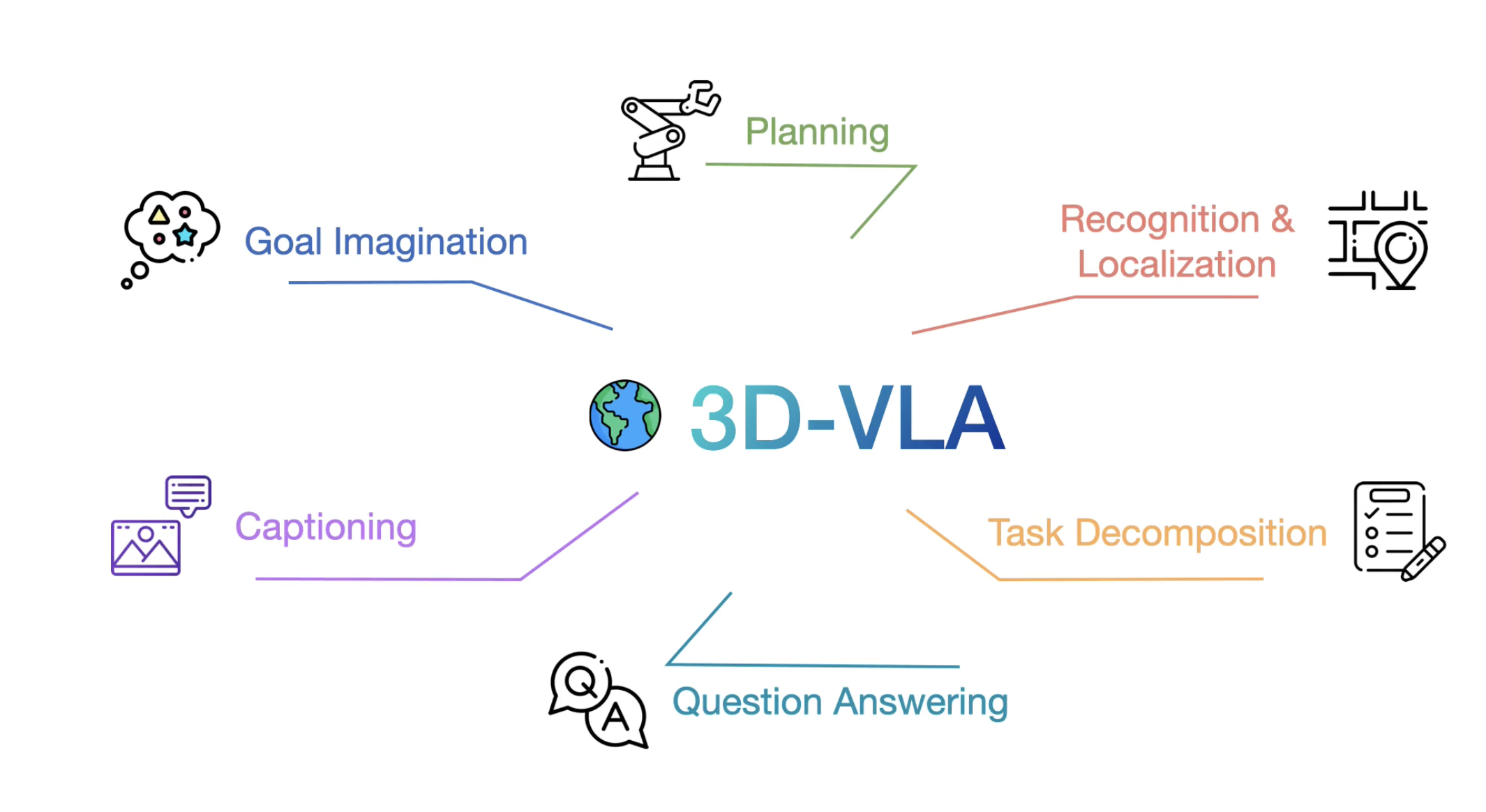
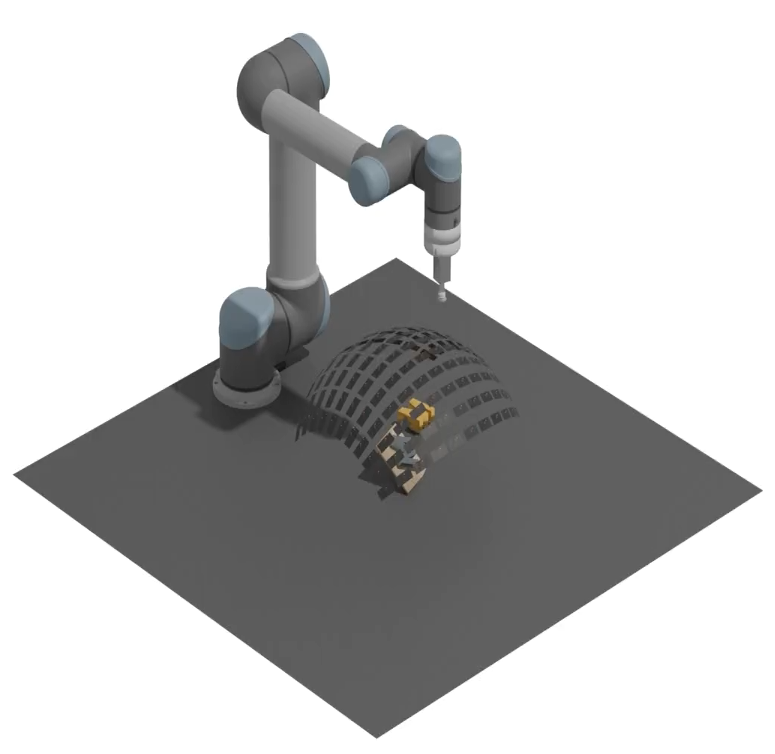
- Embodied Intelligence: grounding world models in perception and action for robotics and interactive decision making.
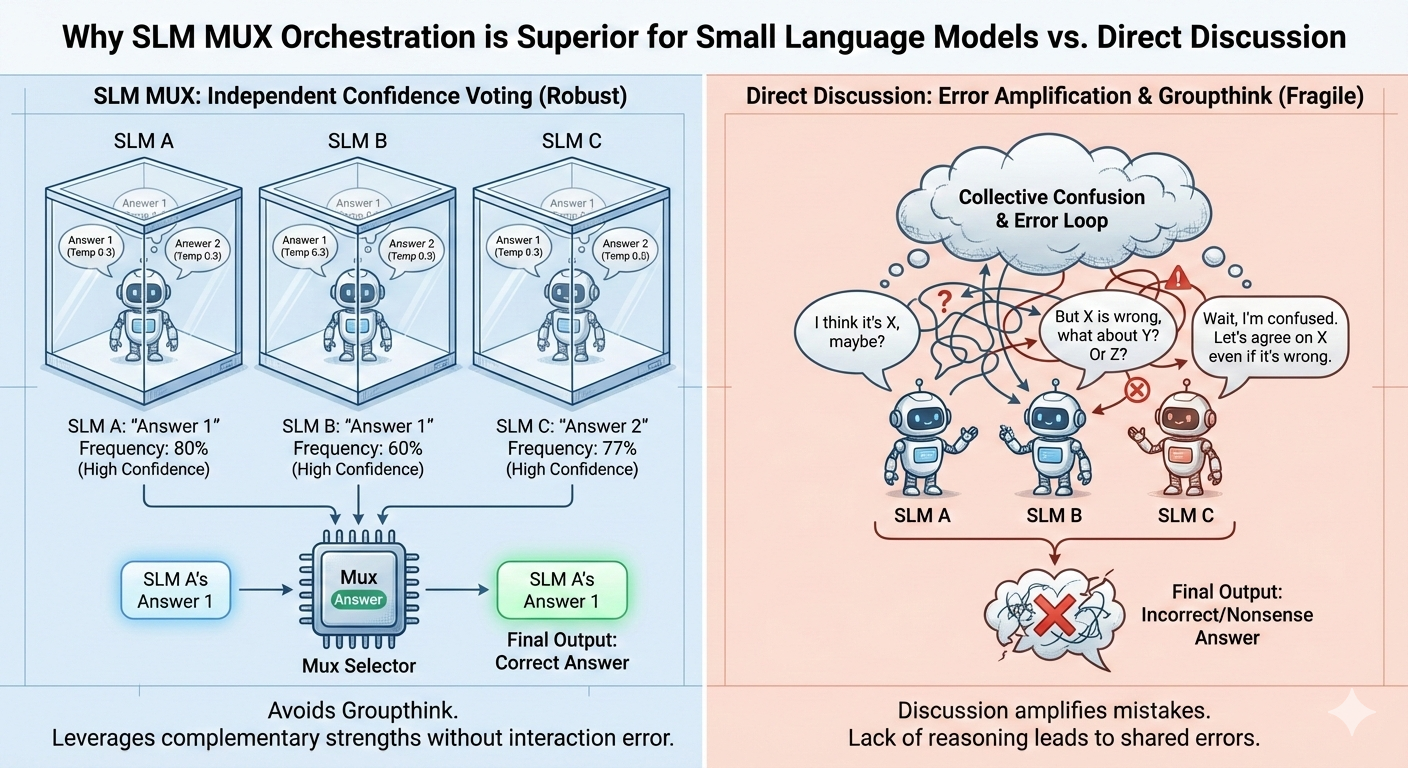
- Multi-Agent Intelligence: developing decentralized systems that coordinate, verify, reason, and improve collectively.
Publications
(/)
Topics:
Showing 12 of 50 publications









No publications found. Try a broader search or clear the current filters.
* Equal contribution; † or + equal advising.